Mobile Manipulation Bringup
January 15, 2026
Here’s a demonstration of basic Mobile Manipulation: showing the ability to pick up an object and move it to another side of the table. This capability was built through systematic bring-up of Locomotion and Manipulation subsystems.
From here, the project could progress into more “Production-Level” versions of the existing pieces or toward bringup of more complex capabilities, such as RL and MPC.
Goals
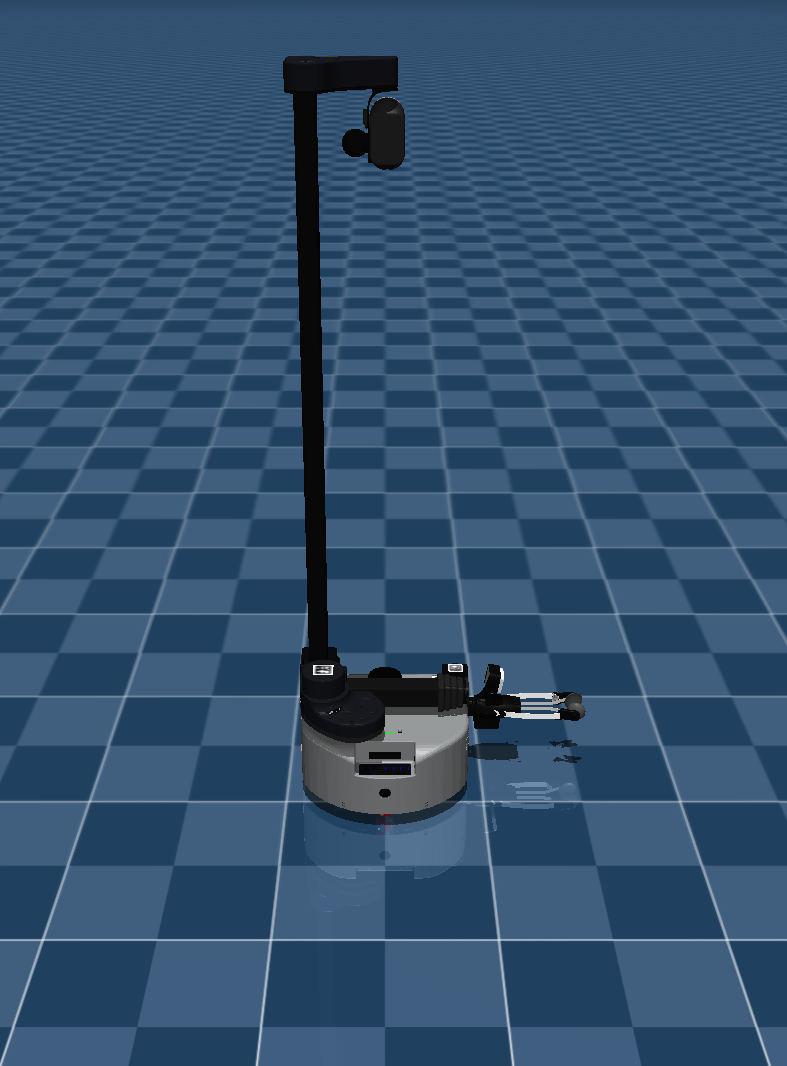
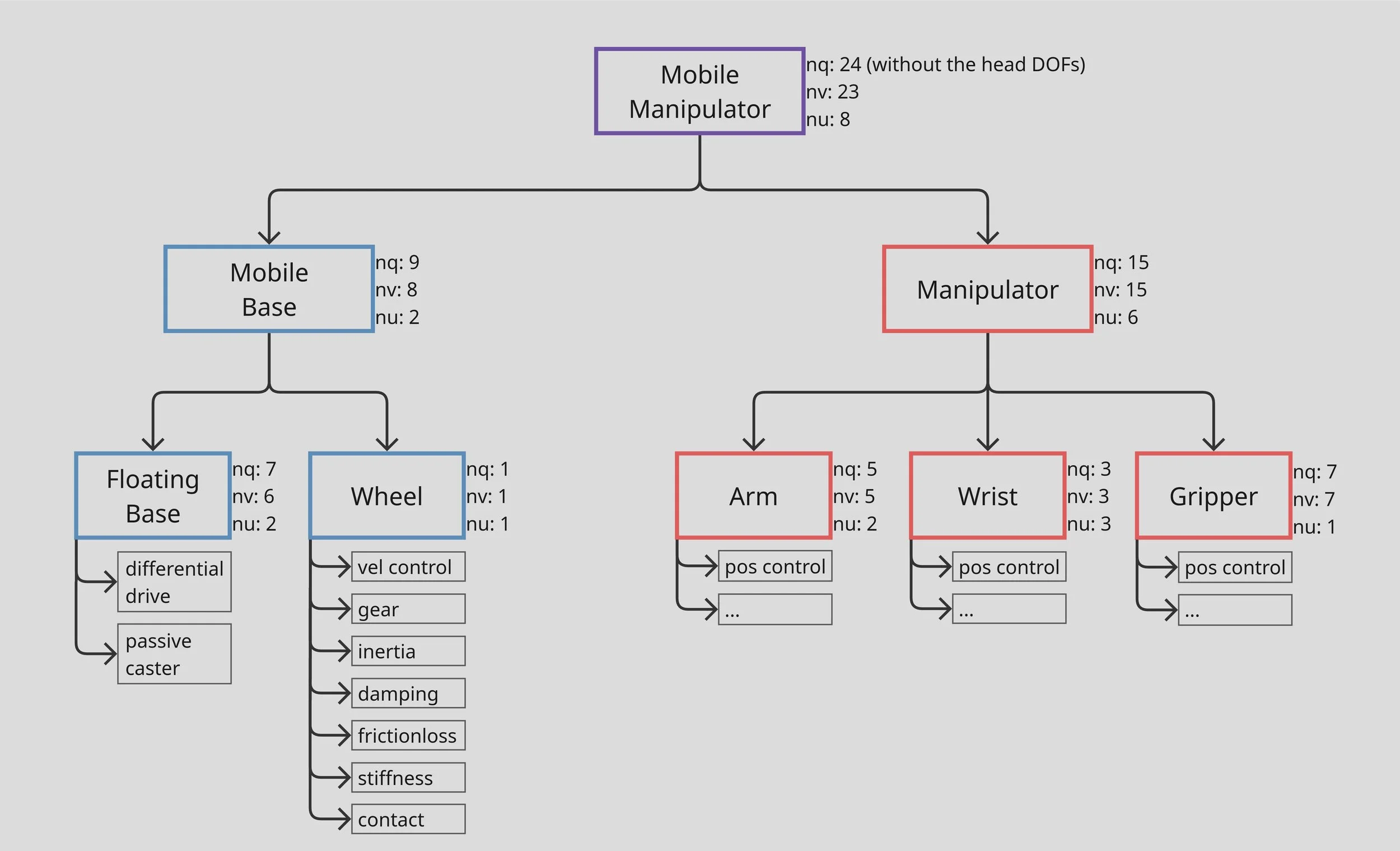
construct a Subsystem Decomposition for Hello Robot Stretch 3
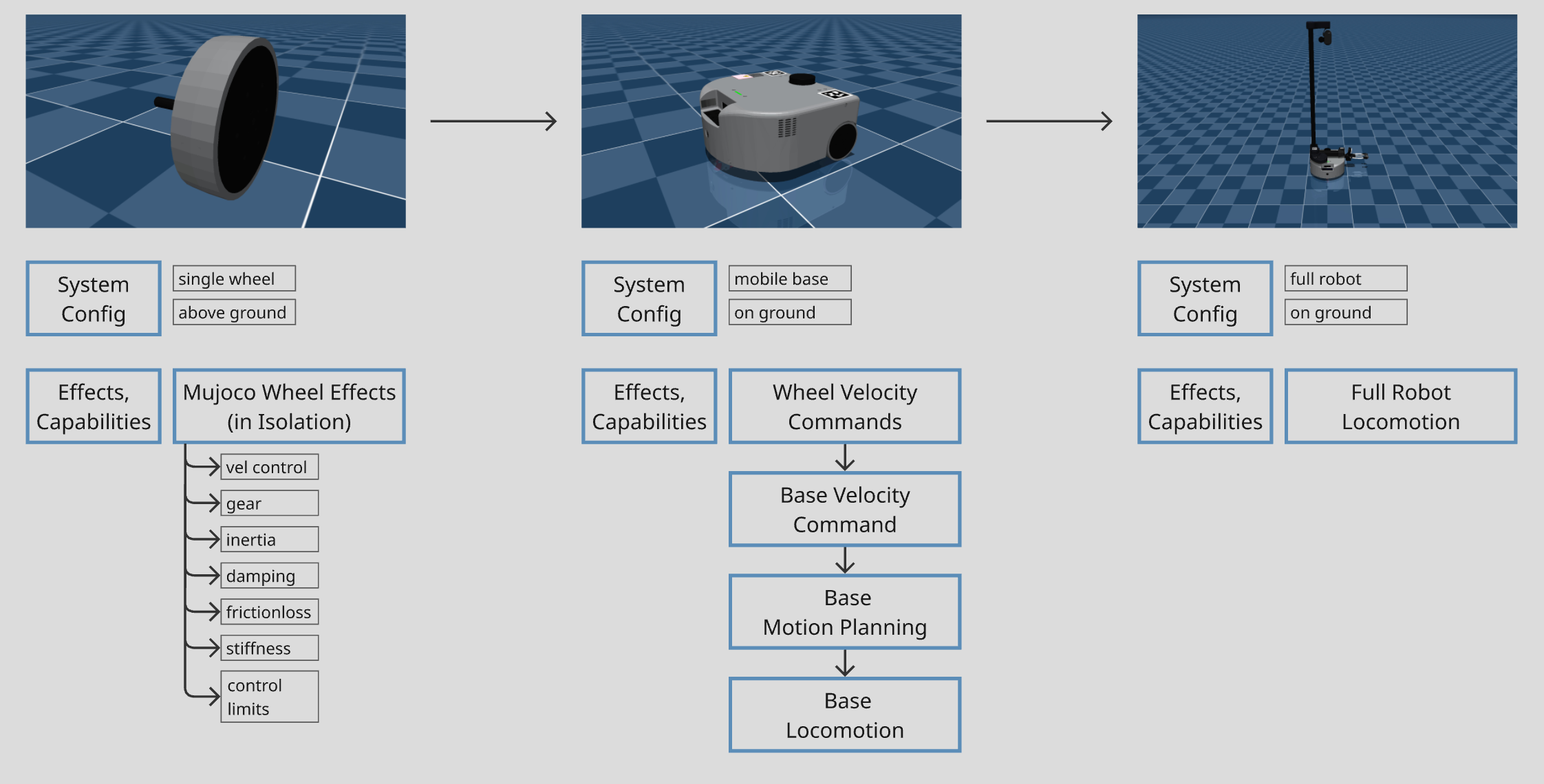
bring-up Locomotion Capability
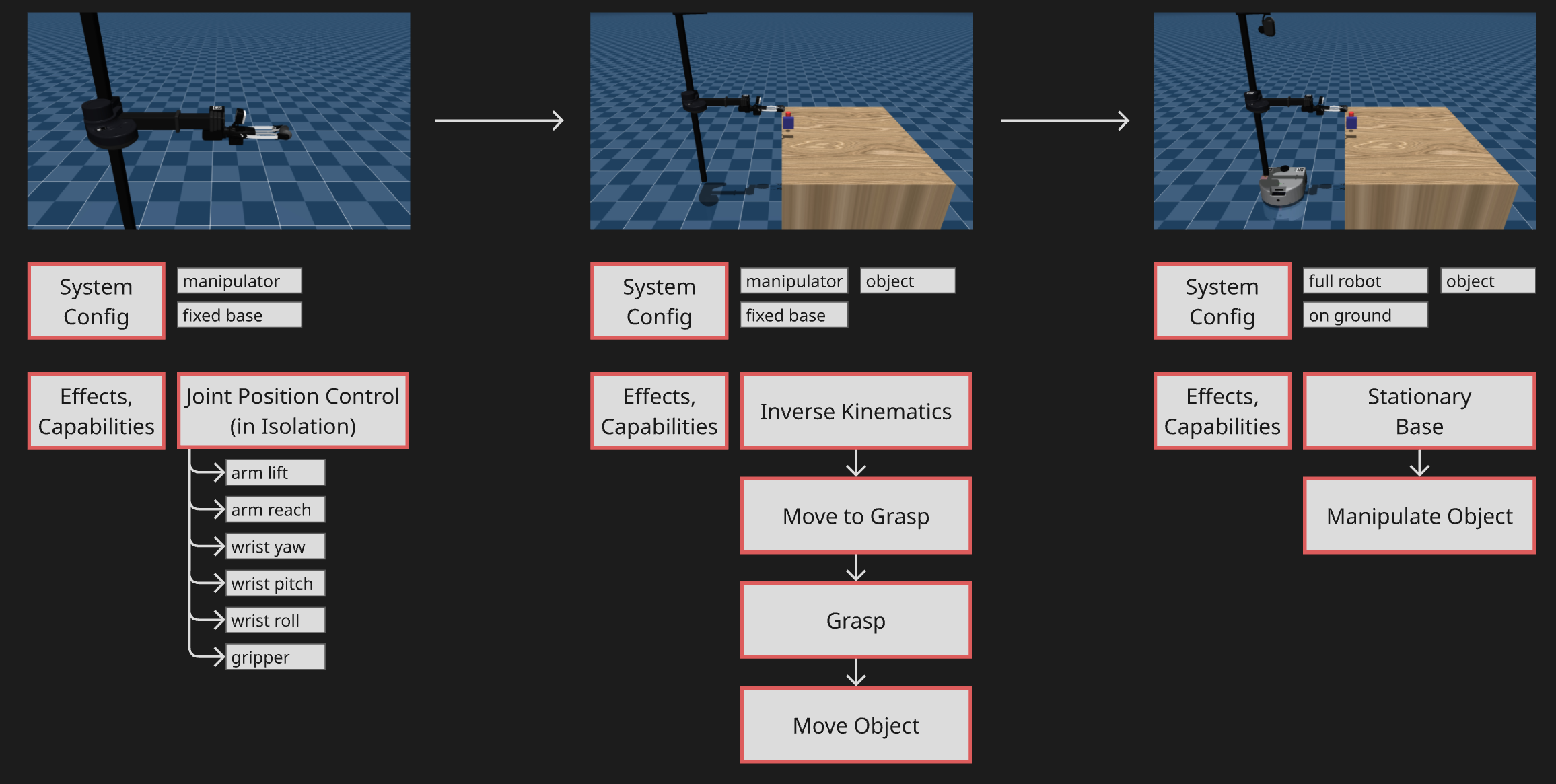
bring-up Manipulation Capability
demonstrate End-to-End Mobile Manipulation (basic)
Notable Tech
C++ for physics and control
acados for motion planning
mujoco simulator (C++)
Hello Robot Stretch 3 (modded wheel velocity limits to enable faster base of 0.3m/s (original max base velocity is only 0.1m/s))
https://github.com/google-deepmind/mujoco_menagerie/tree/main/hello_robot_stretch_3
Stretch3 Decomposition
Locomotion Bringup Roadmap
Manipulation Bringup Roadmap